Configurables
Configurables are runtime-modifiable variables that make testing, tuning, and debugging robot behavior easier without needing to recompile or reupload your code. You can think of them as live sliders or inputs exposed to your Panels Dashboard.
The Configurables Widget also supports search functionality.
What is a Configurable?
A Configurable is a static (Java) or @JvmField (Kotlin) variable marked in a class annotated with @Configurable. These variables are exposed in the Panels UI and can be changed while the robot is running.
Useful for things like:
- PID tuning
- Autonomous positions and paths
- Behavioral toggles (e.g., enabling/disabling subsystems)
- Testing new constants on-the-fly
Configurables UI Features
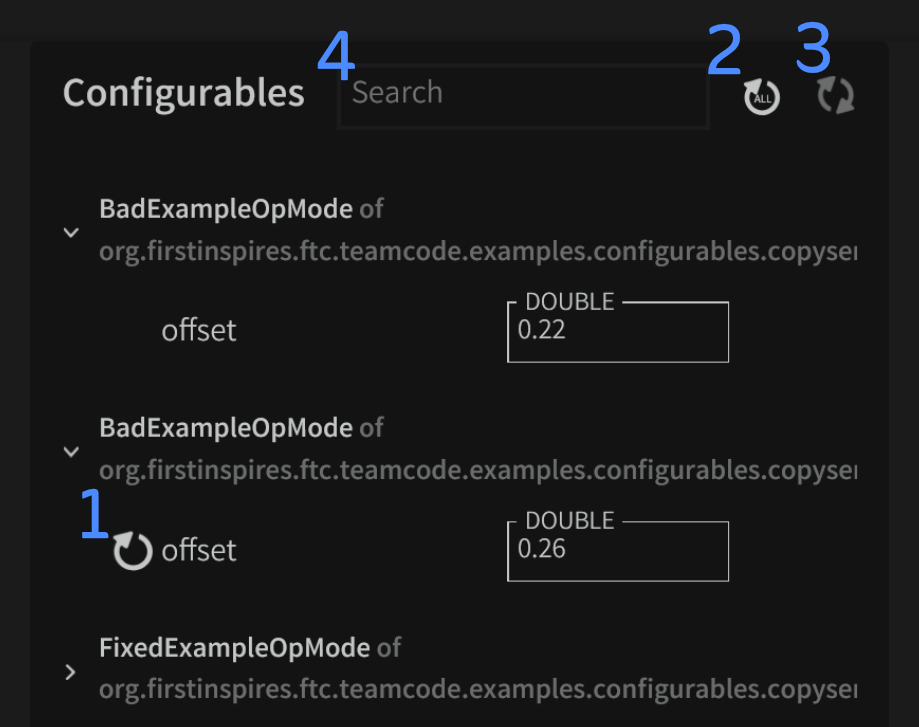
- Update current variable – You can also use
ENTERon supported types to update. - Update all modified variables – Apply changes to all variables that have been modified.
- Toggle Differential Mode – Displays all modified variables.
- Search bar – Allows searching by variable name.
Annotating Classes with @Configurable
To make a class’s fields configurable:
@Configurable
public class RobotConstants {
public static int MAGIC_NUMBER = 32;
}In Kotlin:
@Configurable
object RobotConstants {
@JvmField
var magicNumber = 32
}Real Examples
You can define configurables in many ways. Let's explore the styles supported.
- Java Class
@Configurable
public class TestJavaClass {
public static int testInt = 1;
public static boolean testBoolean = false;
public static String testString = "Hello";
}
- Kotlin Class
@Configurable
class TestKotlinClass {
companion object {
@JvmField
var testDouble: Double = 1.0
}
}- Kotlin Object
@Configurable
object TestKotlinObject {
@JvmField
var testFloat: Float = 1.0f
}Supported Types
All fields must be:
- public static (Java)
- @JvmField inside an object or companion object (Kotlin) And must be non-final.
You can use:
- Primitive types: int, double, boolean, etc.
- Enums
- Strings
- Arrays and Lists
- Maps (read-only unless exposed via a custom dashboard)
- Custom types (detected automatically)
- Generic types (via @GenericValue)
Custom Types
Custom objects are detected automatically.
public class CustomType {
public final int id;
public final String name;
public CustomType(int id, String name) {
this.id = id;
this.name = name;
}
}You can nest custom types, too:
public class NestedType {
public final CustomType child;
public NestedType(CustomType child) {
this.child = child;
}
}Generic Types with @GenericValue
If you have a generic wrapper class:
public class TParamClass<T> {
public final T value;
public TParamClass(T value) { this.value = value; }
}Then mark the instance with its type:
@GenericValue(tParam = Integer.class)
public static TParamClass<Integer> testGeneric = new TParamClass<>(42);Kotlin:
@GenericValue(Int::class)
@JvmField
var testTParamClass = TParamClass(1)Gotchas
Static-only
All configurable fields must be static or top-level @JvmFields. Instance fields won’t be tracked by the dashboard.
Changes are One-Way
Updates on the dashboard side reflect immediately in your robot code. But updates in code do not update the dashboard until a refresh is triggered. This means:
- Editing a value in code does not update it live on the dashboard.
- You can overwrite dashboard changes if your code re-initializes the value.
The Common Pitfall: Copy Semantics
In Kotlin and Java, when you assign an object to a new variable, you copy the reference to the object, not the object itself. This means both variables point to the same memory location. However, when dealing with primitives (like int, double, etc.) or immutable objects, the value is copied directly. This can lead to unexpected behavior if one variable is modified, as the other variable won't reflect the change.
Example: Implementing a configurable Claw System
Bad Example
package org.firstinspires.ftc.teamcode.examples.configurables.copysemantics.bad
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.qualcomm.robotcore.eventloop.opmode.OpMode
import com.qualcomm.robotcore.eventloop.opmode.TeleOp
import com.qualcomm.robotcore.hardware.HardwareMap
class RobotClaw(hardwareMap: HardwareMap, private val clawOffset: Double) {
private val clawServo = hardwareMap.servo.get("claw")
fun setPosition(position: Double) {
clawServo.position = clawOffset + position
}
}
@Configurable
@TeleOp(name = "Bad Example TeleOp")
class BadExampleOpMode : OpMode() {
companion object {
@JvmField
var offset = 0.2
}
private lateinit var robotClaw: RobotClaw
override fun init() {
robotClaw = RobotClaw(hardwareMap, offset)
}
override fun loop() {
robotClaw.setPosition(-gamepad1.left_stick_y.toDouble());
}
}Problem:
In this example, the offset variable is passed as a value to the RobotClaw constructor during initialization. Since Double is a primitive type, its value is copied into the RobotClaw object. If offset is changed later during the OpMode (e.g., via Panels interface), the RobotClaw instance will not reflect the updated value. This leads to inconsistent behavior because the RobotClaw continues to use the old offset value.
Solution 1: Use a Mutable Shared State
One way to solve this issue is to make the clawOffset a mutable shared state that can be updated dynamically. Instead of passing the value directly, we store it in a shared location (e.g., a companion object) and reference it within the RobotClaw.
package org.firstinspires.ftc.teamcode.examples.configurables.copysemantics.fixed
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.qualcomm.robotcore.eventloop.opmode.OpMode
import com.qualcomm.robotcore.eventloop.opmode.TeleOp
import com.qualcomm.robotcore.hardware.HardwareMap
@Configurable
class RobotClaw(hardwareMap: HardwareMap) {
companion object {
@JvmField
var clawOffset = 0.2
}
private val clawServo = hardwareMap.servo.get("claw")
fun setPosition(position: Double) {
clawServo.position = clawOffset + position
}
}
@Configurable
@TeleOp(name = "Fixed Example TeleOp")
class FixedExampleOpMode : OpMode() {
companion object {
@JvmField
var clawOffset = 0.2
}
private lateinit var robotClaw: RobotClaw
override fun init() {
robotClaw = RobotClaw(hardwareMap)
}
override fun loop() {
robotClaw.setPosition(-gamepad1.left_stick_y.toDouble());
}
}Solution 2: Use a Lambda Function
Another elegant solution is to pass a lambda function that retrieves the current value of offset. This ensures that the RobotClaw always queries the latest value of offset whenever it needs it.
package org.firstinspires.ftc.teamcode.examples.configurables.copysemantics.lambda
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.qualcomm.robotcore.eventloop.opmode.OpMode
import com.qualcomm.robotcore.eventloop.opmode.TeleOp
import com.qualcomm.robotcore.hardware.HardwareMap
//class RobotClaw(hardwareMap: HardwareMap, private val clawOffset: Double) {
class RobotClaw(hardwareMap: HardwareMap, private val clawOffset: () -> Double) {
private val clawServo = hardwareMap.servo.get("claw")
fun setPosition(position: Double) {
//clawServo.position = clawOffset + position
clawServo.position = clawOffset() + position
}
}
@Configurable
@TeleOp(name = "Fixed Example with Lambda TeleOp")
class BadExampleOpMode : OpMode() {
companion object {
@JvmField
var offset = 0.2
}
private lateinit var robotClaw: RobotClaw
override fun init() {
//robotClaw = RobotClaw(hardwareMap, offset)
robotClaw = RobotClaw(hardwareMap, { offset })
}
override fun loop() {
robotClaw.setPosition(-gamepad1.left_stick_y.toDouble());
}
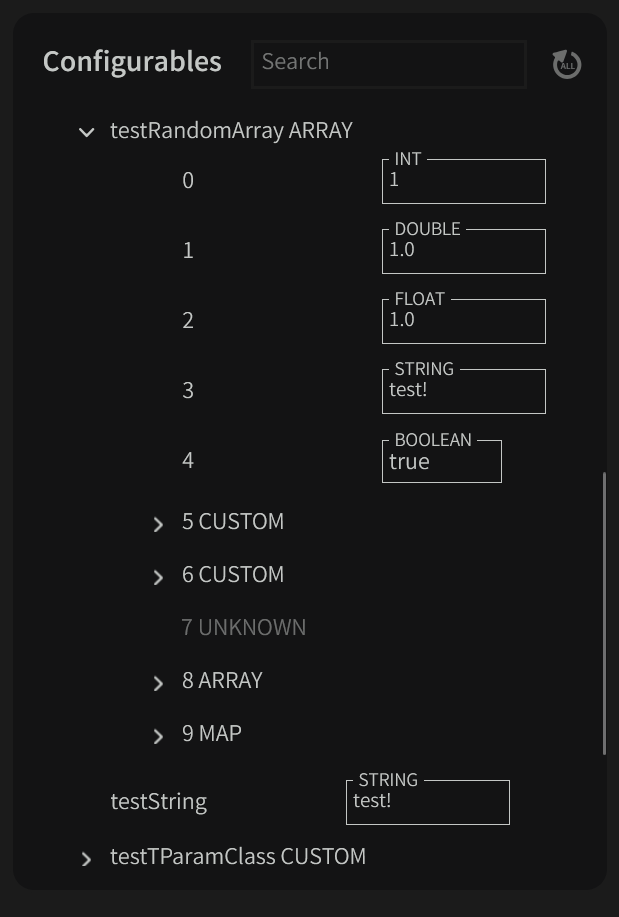
}Playground: Random Test Arrays
You can even test the limits with things like:
@JvmField
var testRandomArray = arrayOf(
1,
1.0,
1.0f,
"test!",
true,
CustomType(1, "test!"),
NestedType(1, "test!", CustomType(2, "test2!")),
UnknownType(1),
arrayOf(
1,
2,
3
),
mapOf(
"one" to 1,
"two" to 2,
"three" to 3
)
)Note: only supported types will render correctly on the dashboard.
 ---
--- Best Practices
- Group related config values into logical classes like
DriveConstants,ArmConfig, etc. - Keep types simple. Avoid overengineering unless you need complex nested types.
- Never assume a configurable is updated in code. Always access live values directly from their source.
Example Configurables Files
Kotlin Object
package org.firstinspires.ftc.teamcode.examples.configurables
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.bylazar.ftcontrol.panels.configurables.annotations.GenericValue
@Configurable
object TestKotlinObject {
@JvmField
var testInt: Int = 1
@JvmField
var testLong: Long = 1L
@JvmField
var testDouble: Double = 1.0
@JvmField
var testFloat: Float = 1.0f
@JvmField
var testString: String = "test!"
@JvmField
var testBoolean: Boolean = false
enum class TestEnum {
TEST1,
TEST2,
TEST3
}
@JvmField
var testEnum: TestEnum = TestEnum.TEST1
@JvmField
var testArray: Array<Int> = arrayOf(1, 2, 3)
@JvmField
var testList: List<Int> = listOf(1, 2, 3)
@JvmField
var testMap: Map<String, Int> = mapOf("one" to 1, "two" to 2, "three" to 3)
class CustomType(
val testInt: Int,
val testString: String
)
@JvmField
var testCustomType: CustomType = CustomType(1, "test!")
class NestedType(
val testInt: Int,
val testString: String,
val testCustomType: CustomType
)
@JvmField
var testNestedType: NestedType = NestedType(1, "test!", CustomType(2, "test2!"))
class UnknownType(
val testInt: Int,
)
@JvmField
var testUnknownType: UnknownType = UnknownType(1)
@JvmField
var testRandomArray = arrayOf(
1,
1.0,
1.0f,
"test!",
true,
CustomType(1, "test!"),
NestedType(1, "test!", CustomType(2, "test2!")),
UnknownType(1),
arrayOf(
1,
2,
3
),
mapOf(
"one" to 1,
"two" to 2,
"three" to 3
)
)
class TParamClass<T>(
val test: T
)
@JvmField
@field:GenericValue(Int::class)
var testTParamClass = TParamClass(1)
}Kotlin Class
package org.firstinspires.ftc.teamcode.examples.configurables
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.bylazar.ftcontrol.panels.configurables.annotations.GenericValue
@Configurable
class TestKotlinClass {
companion object {
@JvmField
var testInt: Int = 1
@JvmField
var testLong: Long = 1L
@JvmField
var testDouble: Double = 1.0
@JvmField
var testFloat: Float = 1.0f
@JvmField
var testString: String = "test!"
@JvmField
var testBoolean: Boolean = false
enum class TestEnum {
TEST1,
TEST2,
TEST3
}
@JvmField
var testEnum: TestEnum = TestEnum.TEST1
@JvmField
var testArray: Array<Int> = arrayOf(1, 2, 3)
@JvmField
var testList: List<Int> = listOf(1, 2, 3)
@JvmField
var testMap: Map<String, Int> = mapOf("one" to 1, "two" to 2, "three" to 3)
class CustomType(
val testInt: Int,
val testString: String
)
@JvmField
var testCustomType: CustomType = CustomType(1, "test!")
class NestedType(
val testInt: Int,
val testString: String,
val testCustomType: CustomType
)
@JvmField
var testNestedType: NestedType = NestedType(1, "test!", CustomType(2, "test2!"))
class UnknownType(
val testInt: Int,
)
@JvmField
var testUnknownType: UnknownType = UnknownType(1)
@JvmField
var testRandomArray = arrayOf(
1,
1.0,
1.0f,
"test!",
true,
CustomType(1, "test!"),
NestedType(1, "test!", CustomType(2, "test2!")),
UnknownType(1),
arrayOf(
1,
2,
3
),
mapOf(
"one" to 1,
"two" to 2,
"three" to 3
)
)
class TParamClass<T>(
val test: T
)
@JvmField
@field:GenericValue(Int::class)
var testTParamClass = TParamClass(1)
}
}Java Class
package org.firstinspires.ftc.teamcode.examples.configurables;
import java.util.List;
import java.util.Map;
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable;
import com.bylazar.ftcontrol.panels.configurables.annotations.GenericValue;
@Configurable
public class TestJavaClass {
public static int testInt = 1;
public static long testLong = 1L;
public static double testDouble = 1.0;
public static float testFloat = 1.0f;
public static String testString = "test!";
public static boolean testBoolean = false;
public enum TestEnum {
TEST1,
TEST2,
TEST3
}
public static TestEnum testEnum = TestEnum.TEST1;
public static int[] testArray = {1, 2, 3};
public static List<Integer> testList = List.of(1, 2, 3);
public static Map<String, Integer> testMap = Map.of("one", 1, "two", 2, "three", 3);
public static class CustomType {
public final int testInt;
public final String testString;
public CustomType(int testInt, String testString) {
this.testInt = testInt;
this.testString = testString;
}
public int getTestInt() {
return testInt;
}
public String getTestString() {
return testString;
}
}
public static CustomType testCustomType = new CustomType(1, "test!");
public static class NestedType {
public final int testInt;
public final String testString;
public final CustomType testCustomType;
public NestedType(int testInt, String testString, CustomType testCustomType) {
this.testInt = testInt;
this.testString = testString;
this.testCustomType = testCustomType;
}
public int getTestInt() {
return testInt;
}
public String getTestString() {
return testString;
}
public CustomType getTestCustomType() {
return testCustomType;
}
}
public static NestedType testNestedType = new NestedType(1, "test!", new CustomType(2, "test2!"));
public static class UnknownType {
public final int testInt;
public UnknownType(int testInt) {
this.testInt = testInt;
}
public int getTestInt() {
return testInt;
}
}
public static UnknownType testUnknownType = new UnknownType(1);
public static Object[] testRandomArray = new Object[]{
1,
1.0,
1.0f,
"test!",
true,
new CustomType(1, "test!"),
new NestedType(1, "test!", new CustomType(2, "test2!")),
new UnknownType(1),
new int[]{1, 2, 3},
Map.of("one", 1, "two", 2, "three", 3)
};
public static class TParamClass<T> {
public final T test;
public TParamClass(T test) {
this.test = test;
}
public T getTest() {
return test;
}
}
@GenericValue(tParam = Integer.class)
public static TParamClass<Integer> testTParamClass = new TParamClass<Integer>(1);
}
Showcase OpMode
package org.firstinspires.ftc.teamcode.examples.configurables
import com.bylazar.ftcontrol.panels.Panels
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.qualcomm.robotcore.eventloop.opmode.OpMode
import com.qualcomm.robotcore.eventloop.opmode.TeleOp
@Configurable
@TeleOp(name = "Test Configurables OpMode")
class TestOpMode: OpMode() {
companion object{
@JvmField
var testInt: Int = 1
@JvmField
var testBoolean: Boolean = false
@JvmField
var testDouble: Double = 1.0
enum class States{
TEST1,
TEST2,
TEST3
}
@JvmField
var testEnum: States = States.TEST1
@JvmField
var testArray: Array<Int> = arrayOf(1, 2, 3)
class CustomType(
@JvmField var testInt: Int,
@JvmField var testString: String
){
override fun toString(): String {
return "CustomType($testInt, $testString)"
}
}
@JvmField
var testCustomType: CustomType = CustomType(1, "test!")
}
val panelsTelemetry = Panels.getTelemetry()
override fun init() {
panelsTelemetry.debug("Init was ran!")
panelsTelemetry.update(telemetry)
}
override fun loop() {
panelsTelemetry.debug("INT: $testInt")
panelsTelemetry.debug("BOOLEAN: $testBoolean")
panelsTelemetry.debug("DOUBLE: $testDouble")
panelsTelemetry.debug("ENUM: $testEnum")
panelsTelemetry.debug("ARRAY: ${testArray.contentToString()}")
panelsTelemetry.debug("CUSTOM TYPE: $testCustomType")
panelsTelemetry.update(telemetry)
}
}A library by Lazar from 19234 ByteForce.