Panels 1.0.0 has released, new docs can be found on panels.bylazar.com .
TPair
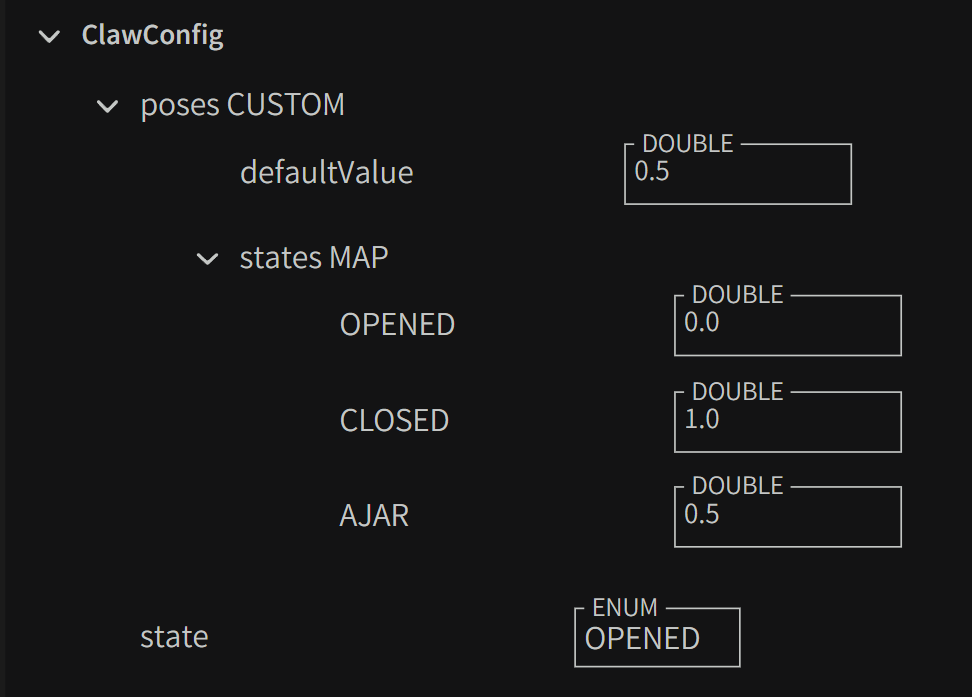
TPair is a utility class in the ftcontrol library for mapping configurable key-value pairs between two types, commonly used for robotic mechanism position control (e.g., mapping states like OPENED/CLOSED to servo positions).
Key Features
- Maps semantic states (e.g., Enum) to numeric/digital values (e.g., Double, Boolean)
- Supports runtime configuration via the ftcontrol UI
- Provides a default fallback value for unmatched keys
Use @GenericValue(KeyType::class, ValueType::class) to preserve type information at runtime (required due to Kotlin type erasure):
Use val currentPosition = poses.get() to access current value.
package org.firstinspires.ftc.teamcode.examples.configurables
import com.bylazar.ftcontrol.panels.configurables.TPair
import com.bylazar.ftcontrol.panels.configurables.annotations.Configurable
import com.bylazar.ftcontrol.panels.configurables.annotations.GenericValue
@Configurable
object ClawConfig {
enum class State {
OPENED,
CLOSED,
AJAR
}
@JvmField
var state: State = State.OPENED
@field:GenericValue(State::class, Double::class)
@JvmField
var poses = TPair({ state }) {
pair(State.OPENED, 0.0)
pair(State.CLOSED, 1.0)
pair(State.AJAR, 0.5)
default(0.5)
}
val clawPos = poses()
val openedPos = poses.getStateValue(State.OPENED)
}kt
A library by Lazar from 19234 ByteForce.
On this page